


特斯拉CEO埃隆·马斯克近日再次批评激光雷达技术,认为这是“错误的解决方案”。他强调,模拟人类神经网络的纯视觉方案才是实现自动驾驶的最佳途径,更能适应复杂的道路环境。
与特斯拉不同,许多国内车企采用激光雷达、摄像头和毫米波雷达的多传感器融合方案,以提升系统的冗余性。然而,马斯克认为这种方案存在“感知不一致性”问题,数据冲突会影响系统判断,降低可靠性。

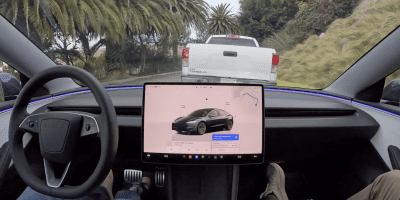
特斯拉的自动驾驶技术完全依赖摄像头,通过视觉神经网络将图像转化为三维场景,并利用计算机分析决策,模仿人类驾驶行为。马斯克强调,基于显式光子计算的视觉技术比融合感知更精确可靠。
值得关注的是,部分国内车企,如小鹏和极越,也开始减少对激光雷达的依赖,转向纯视觉感知。这一趋势表明,马斯克的理念正在引发行业反思。





发表评论